Overview
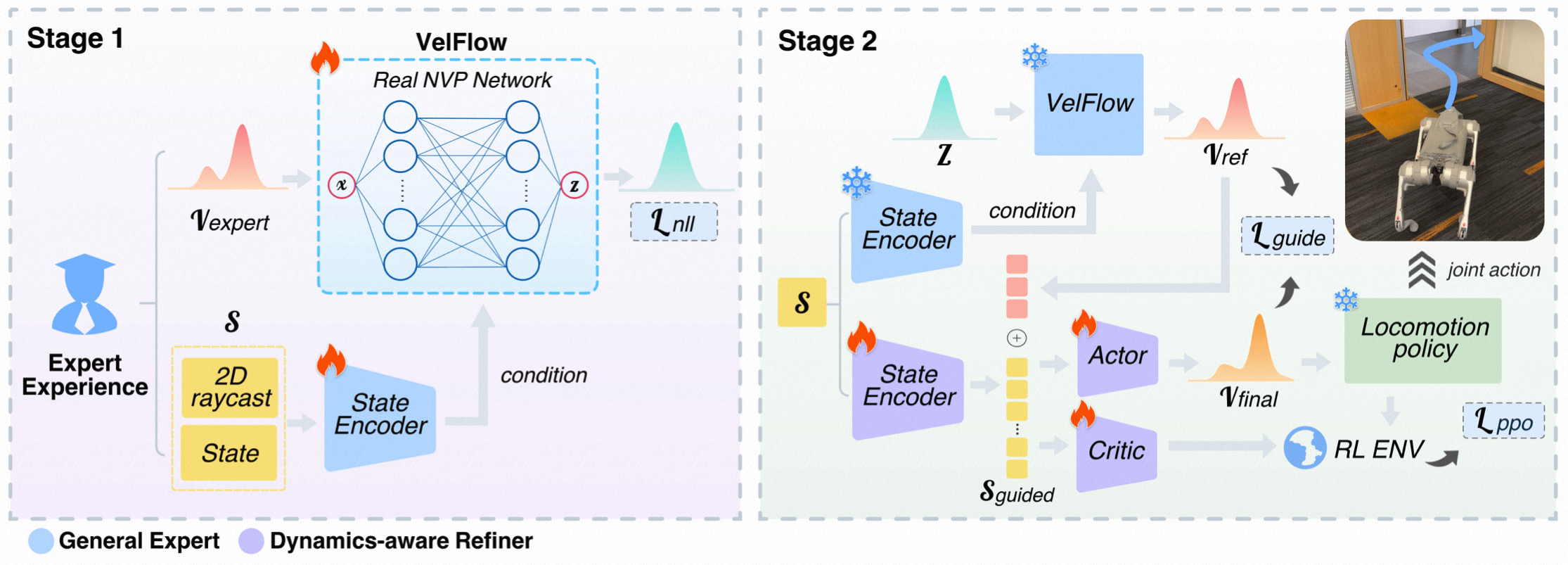
Overview of the CE-Nav two-stage framework. Stage 1 (Left): A multi-modal, embodiment-agnostic General Expert is trained offline via imitation learning on expert data. Stage 2 (Right): The frozen expert is used as a guiding prior to train a Dynamics-Aware Refiner via online reinforcement learning, allowing it to adapt to a specific robot's dynamics.